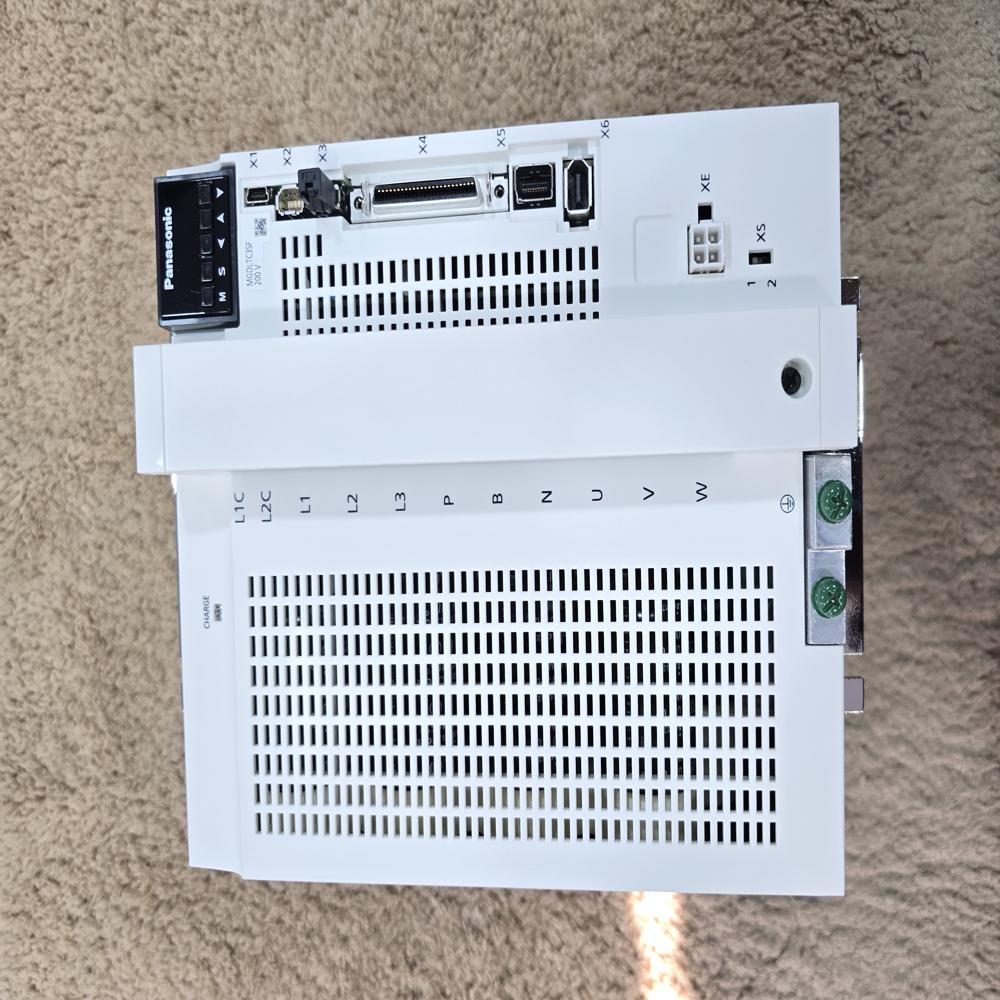
About MHDLTF3BF - E-CAT Panasonic A6 22000W Driver
the Panasonic MHDLTF3BF is the A6B Series (EtherCAT Type) driver for 22,000 W (22 kW) motors. It represents the pinnacle of the Panasonic A6 lineup, combining the massive H-Frame power stage with the world's most popular open industrial network protocol.
Core Technical Specifications
- Rated Power: 22,000 W (22 kW).
- Rated Current Output: 96.0 A (rms).
- Network Protocol: EtherCAT (CoE - CANopen over EtherCAT).
- Input Voltage: 3-phase 200 V to 240 V AC.
- Frame Size: H-Frame (Weight: 31.3 lbs / 14.2 kg).
Physical Specifications (Inches)
| Dimension |
Measurement (in) |
| Width |
8.27" |
| Height |
11.81" |
| Depth |
10.24" |
Key Differences from NF/SF Models
The "BF" model is specifically designed for high-end, multi-brand automation environments.
- Universal Compatibility: It can be controlled by any EtherCAT master (Beckhoff, Omron, ACS, or PC-based controllers).
- Advanced Sync: Uses Distributed Clocks (DC) to ensure that 22 kW of power is released with micro-second precision across multiple axes.
- Reduced Complexity: Like the NF, it uses a single Ethernet cable for control, but uses the more globally standard EtherCAT language rather than Panasonic's proprietary RTEX.
Primary Application
This driver is used in the largest automated systems in the world, such as aerospace wing-milling machines, heavy-duty automotive presses, and high-speed 22 kW material handling where high-speed data and massive force must work in perfect harmony.
The Panasonic MHDLTF3BF (A6B Series) functions as a High-Performance EtherCAT Inverter. It acts as the bridge between a global standard EtherCAT network and the extreme electrical requirements (96 Amps) of a 22,000-watt motor.
1. Open-Network "Slave" Gateway
The defining function of this "BF" model is its EtherCAT communication capability.
- Third-Party Integration: It functions using the universal CoE (CANopen over EtherCAT) protocol. This allows you to control a massive 22 kW Panasonic motor using a controller from any brand (like Beckhoff, Omron, or Keyence).
- Daisy-Chain Wiring: It replaces hundreds of traditional wires with a single RJ45 Ethernet cable, serving as a high-speed data node that receives position and torque commands digitally.
2. High-Current Power Transformation (96A)
- 22kW Power Delivery: Its primary physical function is to manage the 96.0 A of current required to move the MDMFD22 motor. It takes 3-phase raw power and transforms it into the precise high-frequency waveforms needed to generate 140 Nm of torque.
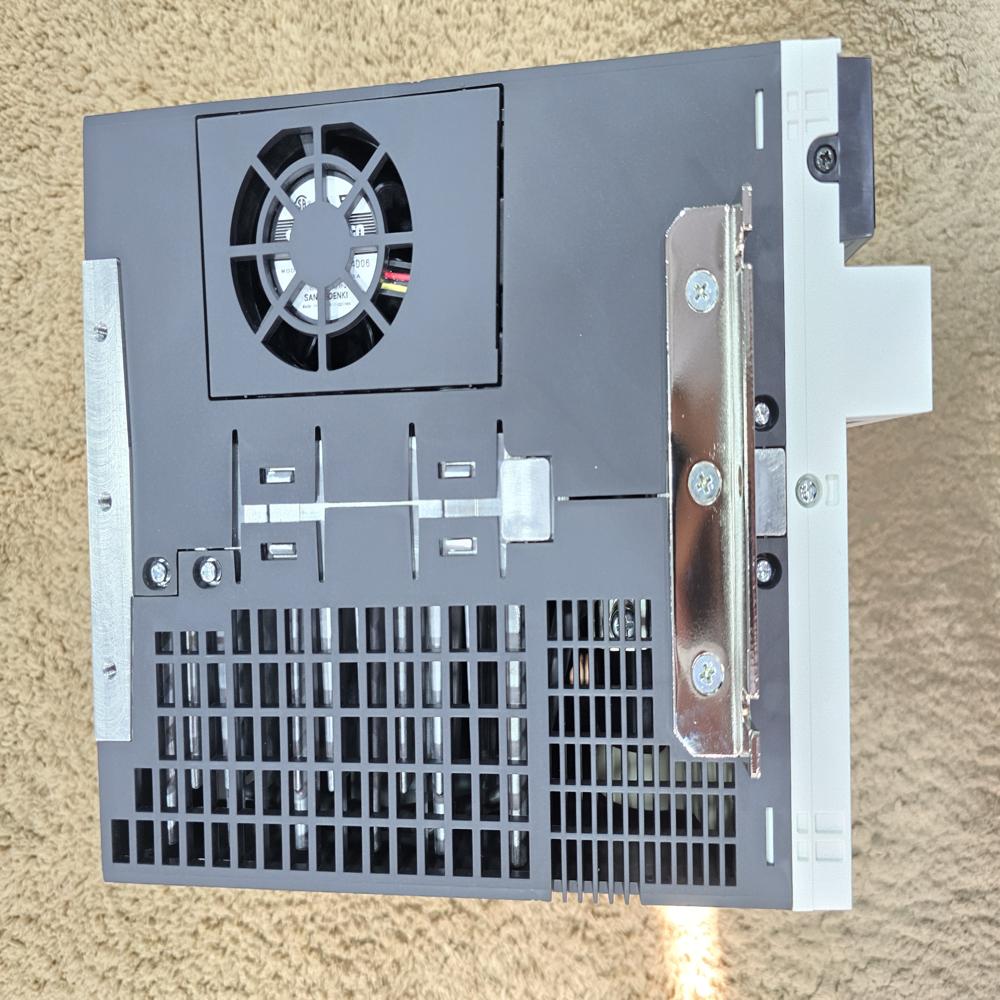
- Thermal Intelligence: Given the massive heat generated at 22 kW, the driver functions to constantly monitor its own H-Frame heatsink temperature and internal fan health to prevent catastrophic failure.
3. Micro-Second "Distributed Clock" Sync
- Global Synchronization: When moving a massive machine axis (like a 22 kW gantry), you often have multiple motors working together. This driver functions to sync its internal clock with the entire network, ensuring that the 22 kW of force is applied at the exact same micro-second as every other axis on the machine.
4. Advanced Machine "Body Guard"
- Safe Torque Off (STO): It functions as a hardware-level safety barrier. It can instantly disable the motors ability to produce torqueessential when managing a 22,000W systemwhile keeping the EtherCAT network active so the PLC doesn't lose track of the machine's status.
- Vibration Cancellation: At this power level, mechanical resonance can destroy a machine. The driver functions to "listen" for vibrations through the 23-bit encoder and automatically generates a frequency "notch" to cancel out the shaking.
5. Big Data Feedback
- Real-Time Monitoring: It functions as a sensor for the entire machine. It sends back data over the EtherCAT network regarding current consumption, friction levels, and load ratios. This allows the controller to predict when a mechanical part is about to fail before it actually breaks.
 Send Inquiry
Send Inquiry






 Send Inquiry
Send Inquiry
 English
English Spanish
Spanish French
French German
German Italian
Italian Chinese (Simplified)
Chinese (Simplified) Japanese
Japanese Korean
Korean Arabic
Arabic Portuguese
Portuguese