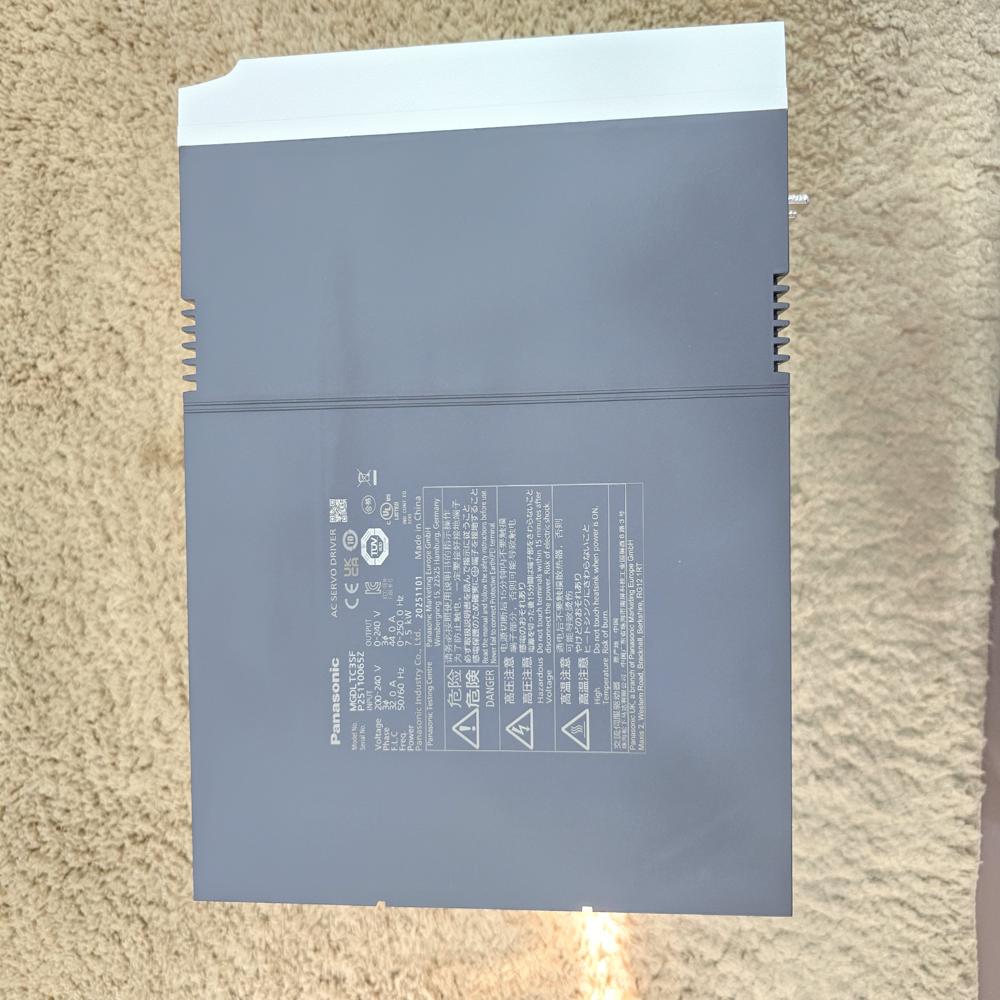
About MHDLTE3BF - E-CAT Panasonic A6 11000W Driver
The Panasonic MHDLTE3BF is the A6B Series (EtherCAT Type) high-capacity servo driver. It is the specialized H-Frame version designed to control 11 kW (11,000 W) and 15 kW (15,000 W) motors using the global EtherCAT network standard.
Core Technical Specifications
- Rated Power: 11 kW to 15 kW.
- Protocol: EtherCAT (CoE - CANopen over EtherCAT).
- Input Voltage: 3-phase 200V to 240V AC.
- Control Modes: Cyclic Synchronous Position (csp), Velocity (csv), Torque (cst), and Profile modes.
- Minimum Cycle Time: 125 s, allowing for extremely smooth motion in multi-axis setups. [1]
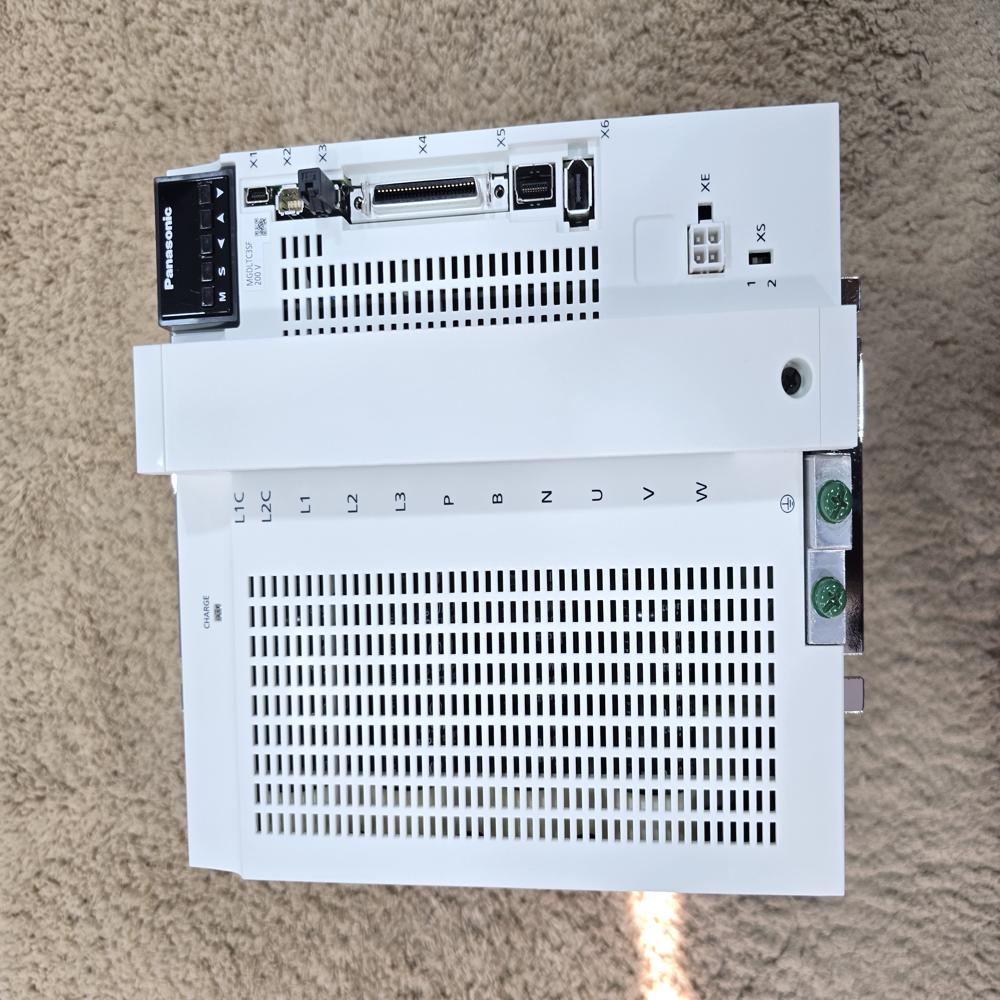
Physical Specifications (H-Frame)
| Dimension |
Measurement (Metric) |
Measurement (Imperial) |
| Weight |
14.2 kg |
31.3 lbs |
| Width |
210 mm |
8.27" |
| Height |
300 mm |
11.81" |
| Depth |
260 mm |
10.24" |
Primary Function
The MHDLTE3BF functions as the high-power "EtherCAT Node" for large industrial machines.
- Network Intelligence: It connects to any standard EtherCAT master (Beckhoff, Omron, etc.) via RJ45 cables, eliminating the need for hundreds of control wires.
- Heavy-Duty Power Drive: It manages the 57A to 65A required to drive 11kW/15kW motors, converting network commands into precise mechanical force.
- Axis Synchronization: It uses Distributed Clocks (DC) to ensure that multiple 15 kW motors on the same network start their moves at the exact same microsecond.
- Integrated Safety: Features Safe Torque Off (STO), which allows the driver to cut motor power instantly while staying connected to the EtherCAT network.
Why choose this over the "SF" or "NF"?
You choose the BF model if your factory uses a standardized EtherCAT network rather than traditional pulse wiring (SF) or Panasonic's proprietary RTEX (NF).
The Panasonic MHDLTE3BF (A6B Series) functions as a High-Power EtherCAT Communication Bridge. It takes complex digital commands from an EtherCAT network and converts them into the massive electrical current (over 57A) needed to move an 11 kW or 15 kW motor.
1. EtherCAT "Open Network" Translator
The core function of the "BF" model is its ability to talk to any brand of controller (Beckhoff, Omron, Keyence, etc.) that uses the EtherCAT standard.
- CoE (CANopen over EtherCAT): It functions using a universal language for motion. The controller says "Move to Position X," and the driver handles the complex math of how to get the 11 kW motor there.
- Reduced Wiring: Instead of a thick bundle of 20+ control wires, it functions using a single standard Ethernet cable (RJ45), simplifying the electrical cabinet.
2. Micro-Second Multi-Axis Sync
- Distributed Clocks (DC): In large 11 kW machines, you often have multiple motors working together. This driver functions to synchronize its internal clock with all other drivers on the network. This ensures that every motor starts and stops at the exact same microsecond, which is critical for precision CNC cutting or synchronized lifting.
3. Massive Energy Management
- H-Frame Power Delivery: It manages the high-voltage 3-phase power required for 11,000 Watts of output. It functions to protect the motor from surges and ensures the current flow is smooth enough to prevent "jerking" at low speeds.
- Regenerative Braking: When a heavy 11 kW load stops, it acts like a generator. The driver functions to capture this "returned" electricity and safely bleed it off through resistors to prevent the system from blowing a fuse.
4. Machine "Health" Reporting
Because it is a network driver, it functions as a constant data stream back to the operator:
- Real-Time Feedback: It sends back data on motor temperature, current consumption, and exact position 8 million times per revolution.
- Predictive Maintenance: It can detect if a mechanical part is starting to wear out by monitoring increased friction levels, and it sends an alert over the EtherCAT network before the machine breaks down.
5. Hardware-Level Safety (STO)
- Safe Torque Off: It has a dedicated hardware function to cut power to the motor's "muscles" (the power transistors) while keeping its "brain" (the communication) alive. This allows an operator to safely enter a machine cell without the driver losing its place on the network.
Summary: This is the "smartest" and most flexible version of the high-power drivers. It allows an 11 kW Panasonic Motor to be easily added to any modern industrial network.
 Send Inquiry
Send Inquiry






 Send Inquiry
Send Inquiry
 English
English Spanish
Spanish French
French German
German Italian
Italian Chinese (Simplified)
Chinese (Simplified) Japanese
Japanese Korean
Korean Arabic
Arabic Portuguese
Portuguese