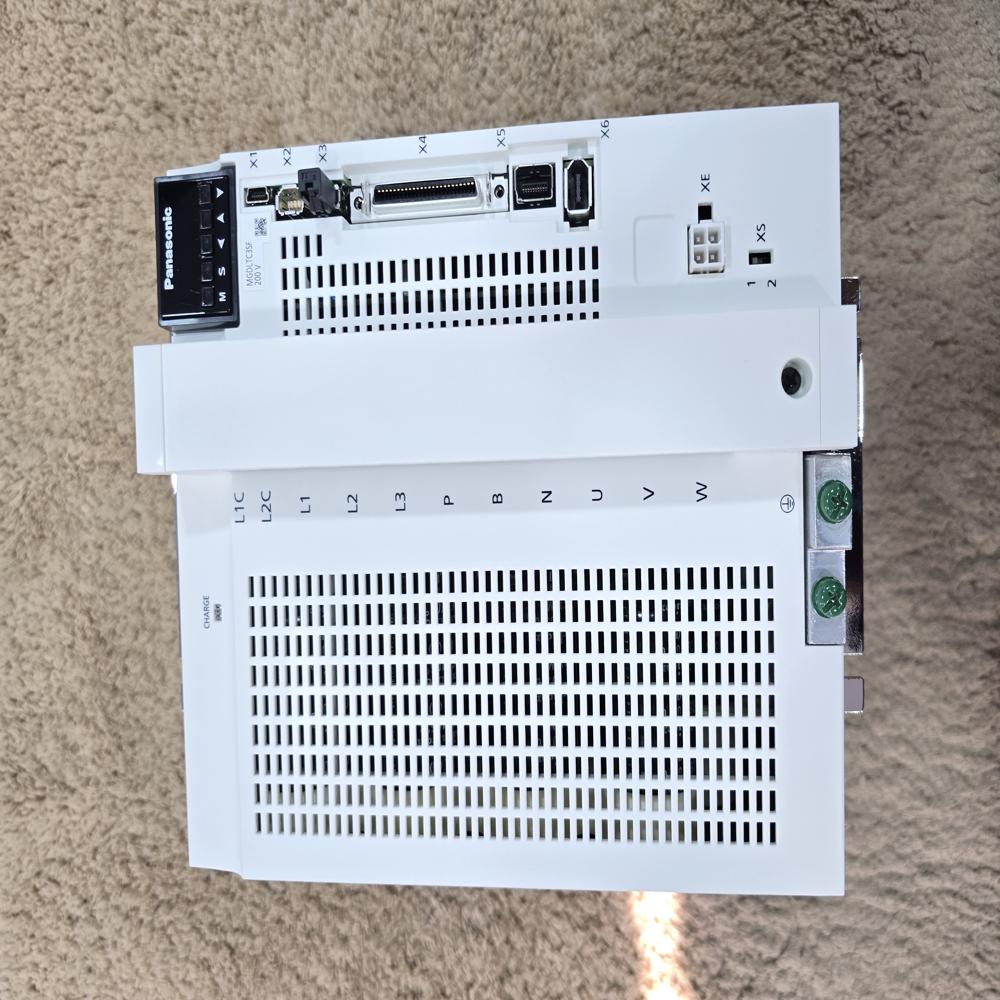
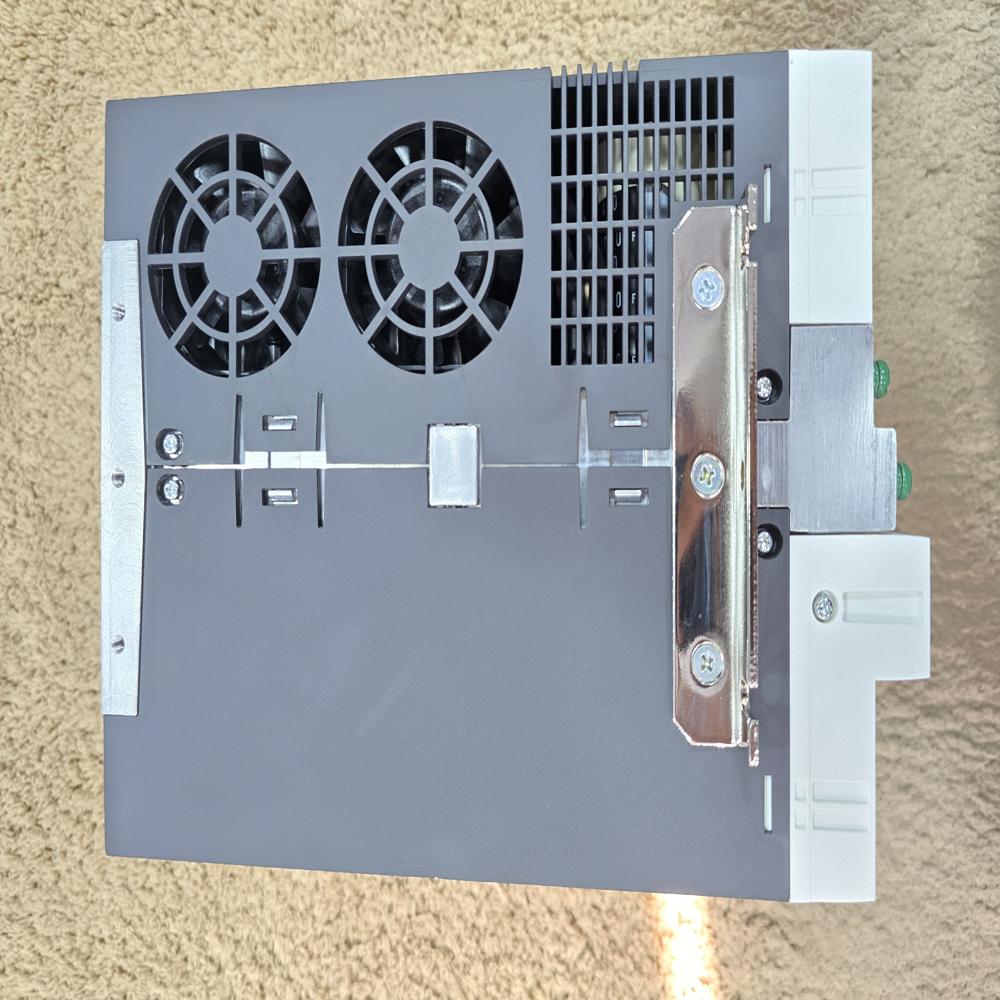
The Panasonic MGDLTC3BF is the
MINAS A6B Series high-power network servo driver specifically designed for
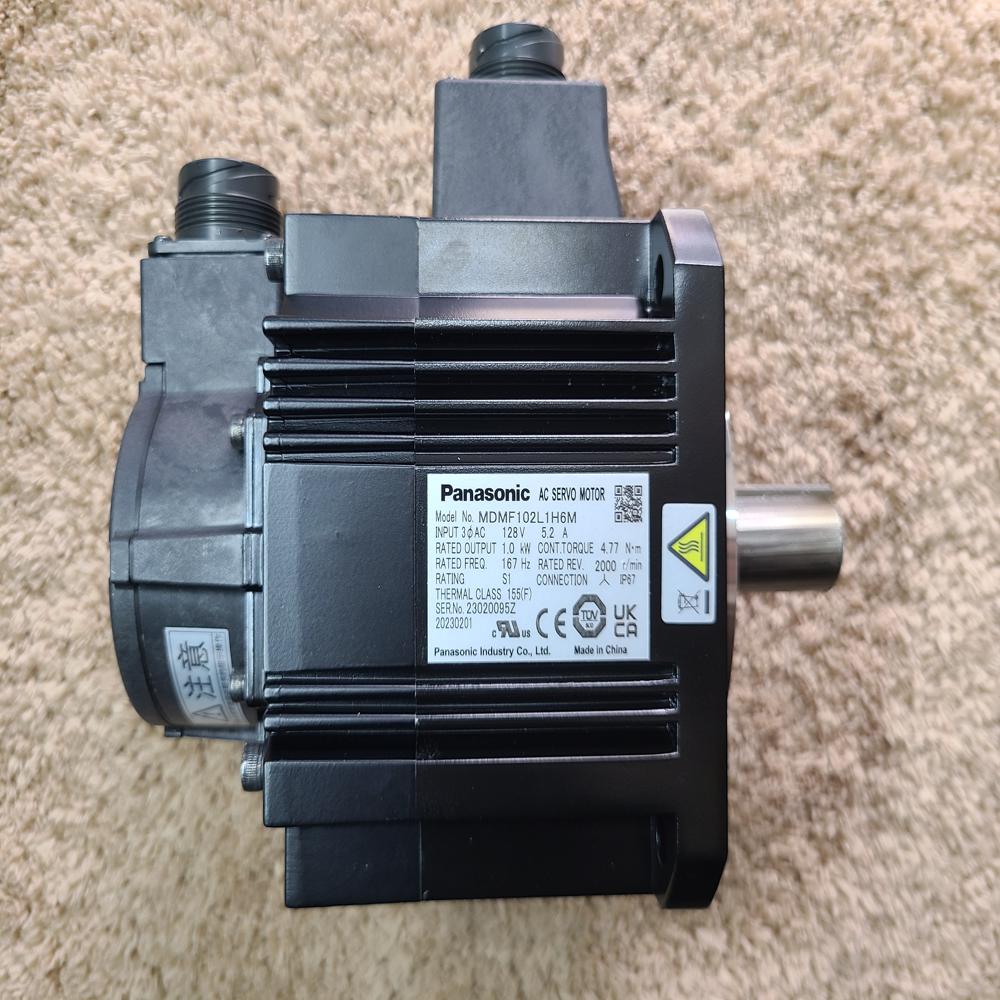
EtherCAT communication. It manages the 7.5 kW motors (like your MDMF752 model) in high-speed, multi-axis automated systems. [
1,
2]
The "B" in the model number designates it as an
EtherCAT type, distinguishing it from the RTEX (A6N) or Pulse/Analog (A6SF) models. [
1]
The Panasonic MGDLTC3BF (A6B Series) functions as an EtherCAT-native Power Controller. While it handles the same 7.5 kW electrical load as the previous models, its internal logic is built entirely around the EtherCAT open industrial protocol.
1. Universal "Open Network" Communication
The primary function of this "BF" model is to act as a CoE (CANopen over EtherCAT) slave.
- Plug-and-Play with Third-Party PLCs: Unlike the RTEX version, this driver is designed to talk to almost any brand of controller (Beckhoff, Omron, Keyence, or PC-based systems) using standard EtherCAT cables.
- CoE Device Profile: It functions using standardized motion profiles (CiA402), meaning it follows universal commands for "Move to Position" or "Homing" that are recognized across the industry.
2. Micro-Second Synchronization (Distributed Clocks)
- Simultaneous Multi-Axis Control: It uses Distributed Clocks (DC) to sync its internal clock with other drivers on the network. This allows multiple 7.5 kW motors to start and stop at the exact same micro-second, which is essential for 5-axis CNC machining or synchronized heavy-lift robots.
- Fast Cycle Times: It can receive a new instruction every 125 microseconds, making the motion extremely smooth and fluid.
3. Precise High-Power Execution
- Current Injection: It converts your 3-phase 200V power into high-amperage (40.2A) current pulses. It functions to "force" the motor to follow the digital EtherCAT command exactly, even if the 48 Nm load is resisting the movement.
- 3.2 kHz Response: It monitors the motor's position so rapidly that it can detect and correct a "stall" or a "bump" before the human eye can see it.
4. Advanced Maintenance Functions
- Condition Monitoring: The driver functions as a "sensor" for the machine's health. It tracks the friction levels and load ratios over time. If a bearing starts to wear out or a belt gets loose, the driver reports this data over EtherCAT to the master PLC for "Predictive Maintenance."
- PANATERM via EtherCAT: You can often perform tuning and setup directly through the network cable, rather than needing a separate USB connection for every drive.
5. Integrated Safety (STO)
- Safe Torque Off: It functions to disable the power transistors in the driver's output stage. This ensures the motor cannot produce torque (it goes limp) during a safety event, even if the internal computer is still receiving "Run" commands from the network.
Summary: The A6B is the most flexible version for modern factories. It allows you to use a 7.5 kW Panasonic Motor with any major brand's controller using the world's most popular high-speed industrial network.
 Send Inquiry
Send Inquiry





 Send Inquiry
Send Inquiry
 English
English Spanish
Spanish French
French German
German Italian
Italian Chinese (Simplified)
Chinese (Simplified) Japanese
Japanese Korean
Korean Arabic
Arabic Portuguese
Portuguese